Trong các PoC này, TRI-AD đã xác minh rằng, cả hai phương pháp sau đều có hiệu quả đối với việc xây dựng bản đồ HD:
1. Xây dựng thông tin bản đồ để lái xe tự động, thông qua dữ liệu bản đồ được lấy từ camera của các phương tiện thông thường cũng như hình ảnh vệ tinh, mà không sử dụng các phương tiện thu thập dữ liệu thông thường như phương tiện khảo sát.
2. Áp dụng dữ liệu phương tiện từ Nền tảng lập bản đồ tự động (Automated Mapping Platform – AMP) của TRI-AD cho các nền tảng của các công ty khác bằng cách chuyển đổi định dạng dữ liệu và áp dụng các thuật toán sửa lỗi.
Bằng cách sử dụng kết quả của các PoC này, dự kiến, có thể rút ngắn độ trễ trong việc cập nhật bản đồ HD cho lái xe tự động, các khu vực mà bản đồ HD bao quát tới có thể được mở rộng nhanh chóng và chi phí để xây dựng và duy trì bản đồ HD có thể giảm đáng kể.
Tóm tắt các kết quả của PoC
Kể từ ngày 25 tháng 4 năm 2019, Công ty Maxar Technologies (Maxar) – một đối tác và doanh nghiệp đổi mới đáng tin cậy trong Cơ sở hạ tầng không gian và thông tin về trái đất; NTT DATA Corporation- tập đoàn cung cấp dịch vụ công nghệ thông tin hàng đầu của Nhật Bản và TRI-AD hợp tác trên một PoC để xây dựng bản đồ HD tự động dành cho các xe tự hành sử dụng hình ảnh vệ tinh thương mại có độ phân giải cao nhất. PoC chứng minh rằng, giờ đây có thể tự động trích xuất thông tin bản đồ cần thiết bằng cách phân tích, loại bỏ và sửa các pixel hình ảnh không có bản đồ, như ô tô, bóng tối và các vệt do độ nghiêng của các tòa nhà trong hình ảnh vệ tinh. Hiện tại, các bản đồ có độ chính xác tương đối 25 cm (*) đã được tạo trong 23 phường ở Tokyo, cũng như 6 thành phố trên toàn thế giới và được xác minh là hữu ích cho mục đích lái xe tự động (Tham khảo hình 1, 2 và 3).

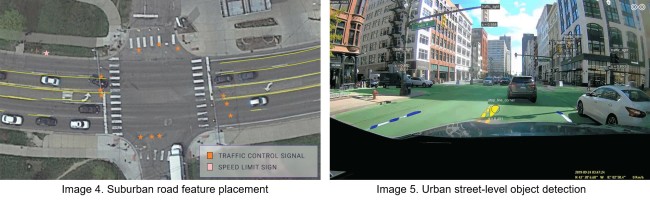
TRI-AD và CARMERA Inc. – một nền tảng tình báo đường bộ hàng đầu – đã thực hiện thành công sáng kiến lập bản đồ HD dựa trên máy ảnh. Là một phần của quan hệ đối tác toàn cầu của hai công ty này, sự hợp tác này đã sử dụng máy ghi âm ổ đĩa “dashcam” để phát hiện và đưa vào các tính năng chính của đường – như vạch kẻ đường, tín hiệu giao thông và biển báo – trong 23 phường ở Tokyo và 2 thành phố ở Mỹ. Dự án đã đạt được độ chính xác tương đối 40 cm (*) cho các tính năng điều hướng chính – một tiến bộ lớn trong việc phát hiện chỉ bằng camera.
Công việc của TRI-AD với CARMERA đã sử dụng cùng một công nghệ xử lý và tầm nhìn máy tính như Sự kiện Thời gian thực của CARMERA và công cụ Quản lý thay đổi. Công cụ này phát hiện, xác thực và cung cấp các cập nhật quan trọng cho hệ thống lập bản đồ HD tái tạo của CARMERA trong vài phút thay vì vài tháng. Bằng cách sử dụng máy ảnh xe ở cấp tiêu dùng phổ biến trên toàn thế giới, TRI-AD và CARMERA đã giới thiệu một cách tiếp cận có thể mở rộng để tạo bản đồ thế hệ tiếp theo.
TRI-AD cũng hợp tác trong một PoC với TomTom International BV, một công ty chuyên về công nghệ xác định vị trí độc lập hàng đầu.
Trong các mối quan hệ hợp tác trên, các công ty đã chỉ ra rằng, những con đường hạng thấp hơn (đường đô thị), bao gồm các vạch kẻ đường cần thiết cho việc lái xe tự động, có thể được tạo ra hoặc cập nhật thành công trong thời gian gần với thời gian thực trên bản đồ HD của TomTom International. Giải pháp đã đạt được bằng cách xác minh độ tin cậy của dữ liệu phương tiện được thu thập bởi AMP của TRI-AD, sau đó chuyển đổi nó thành đầu vào gắn với nền tảng lập bản đồ giao dịch dựa trên đám mây của TomTom International.
TRI-AD đã hợp tác với HERE Technologies – nền tảng công nghệ và dữ liệu xác định vị trí hàng đầu thế giới cho PoC này. Với việc sửa các lỗi vị trí trong dữ liệu xe do TRI-AD thu thập, HERE Technologies có thể tự động tạo bản đồ mặt đường bằng công nghệ “Tự phục hồi” (Self-Healing) tiên tiến. Bằng cách chỉ sử dụng dữ liệu cảm biến xe, HERE Technologies đã nhập dữ liệu vào nền tảng của mình và tự động tạo các bản đồ HD, bao gồm thông tin về làn đường cần thiết cho việc lái xe tự động. Bản đồ HD sống động của HERE Technologies đã được chọn để cung cấp năng lượng cho một số chương trình xe tự động cấp 3 uy tín nhất thế giới của nhà sản xuất thiết bị gốc (Original Equipment Manufacturer – OEM).
Ông Mandali Khalesi, Phó chủ tịch phụ trách Bộ phận chiến lược và bản đồ lái xe tự động của TRI-AD, cho biết: “Tôi rất vui mừng được thông báo kết quả của PoC với Maxar, NTT DATA và CARMERA và cả kết quả của các đối tác trình diễn mới của chúng tôi, TomTom International. và HERE Technologies. Chúng tôi đã tiến một bước gần hơn đến một tương lai, nơi việc lái xe tự động trở thành một công nghệ an toàn hơn và dễ tiếp cận hơn cho tất cả mọi người. Chúng tôi sẽ tiếp tục hợp tác với các đối tác, khi thực hiện thêm công việc tinh chỉnh độ chính xác”.
Ghi chú: (*) Giá trị tham chiếu trong một số môi trường có độ chính xác dữ liệu tốt trong các vùng mục tiêu của các PoC này.
Thông tin về TRI-AD
Có trụ sở tại Tokyo, Nhật Bản, Toyota Research Institute-Advanced Development, Inc. (TRI-AD) được thành lập vào tháng 3 năm 2018, với mục đích phát triển các sản phẩm sáng tạo sẽ cho phép thực hiện tầm nhìn của Toyota là “Mobility for All” (tạm dịch khả năng di động dành cho tất cả). Nhiệm vụ của TRI-AD là tạo ra công nghệ mới và các hệ thống an toàn tiên tiến cho thế giới. TRI-AD cũng giám sát Dự án Woven City (tạm dịch: thành phố được thêu dệt- thành phố mà Toyota xây dựng để trở thành một nơi nghiên cứu và thử nghiệm các công nghệ tiên tiến) sẽ đóng vai trò là vườn ươm cho thiết kế thành phố thông minh, kết nối di động và công nghệ robot từ Toyota và các đối tác.
Để biết thêm thông tin về TRI-AD, hãy truy cập: www.tri-ad.global.